UAS Configuration
The UAS connected to flight control software to begin sensor calibration
During my undergraduate journey, I've had the honor of leading several engineering project teams, notably the payload team of CSULB’s Long Beach Rocketry, a participant in NASA's University Student Launch Competition. Guiding a team of 25 exceptional engineering students, we collaborated throughout multiple year-long competition design life cycles, with a strong emphasis on design review, mechanical design, test engineering, and system manufacturing. Working alongside these talented individuals not only enriched our projects but also forged lasting friendships, turning this academic experience into a privileged opportunity for both professional and personal growth.
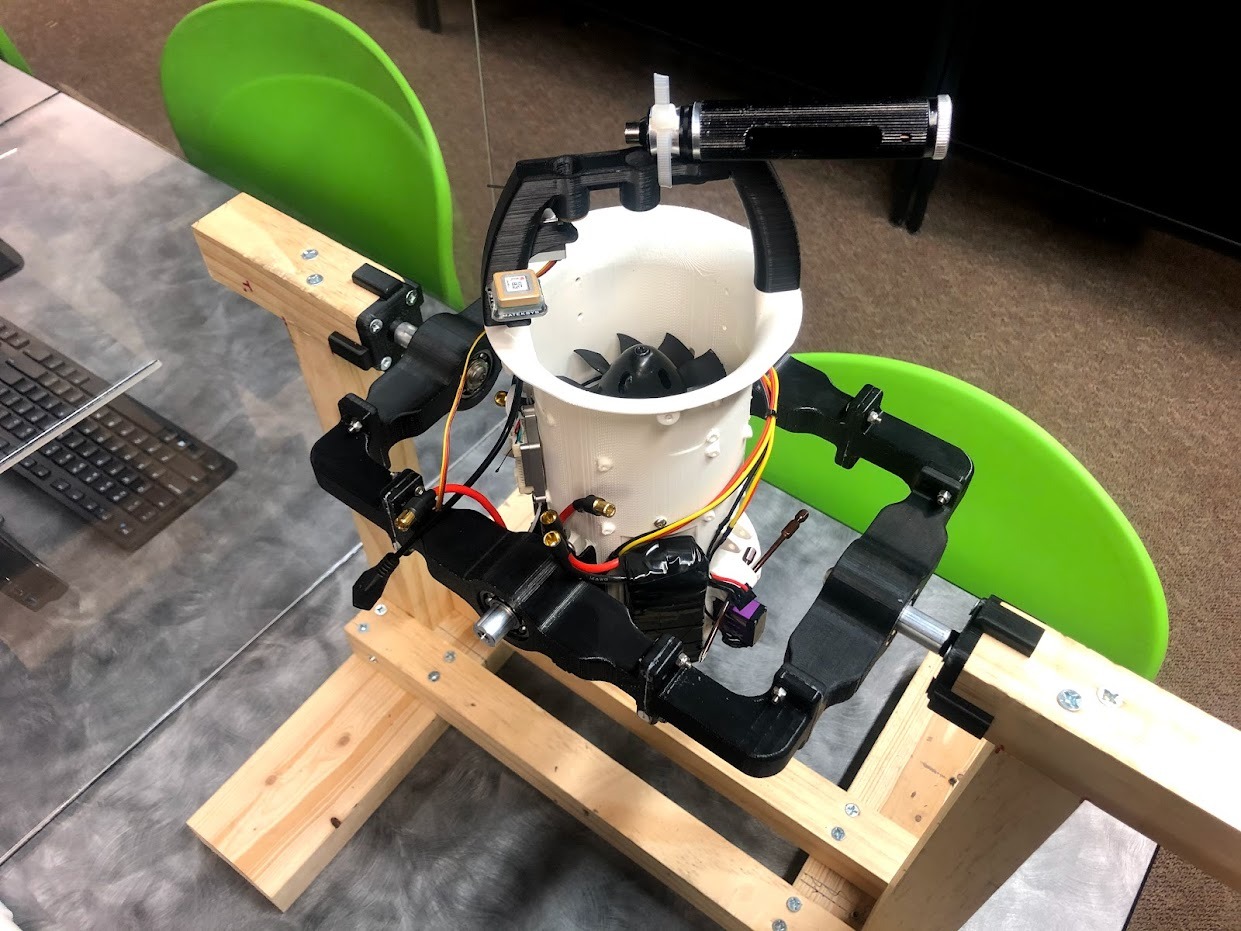
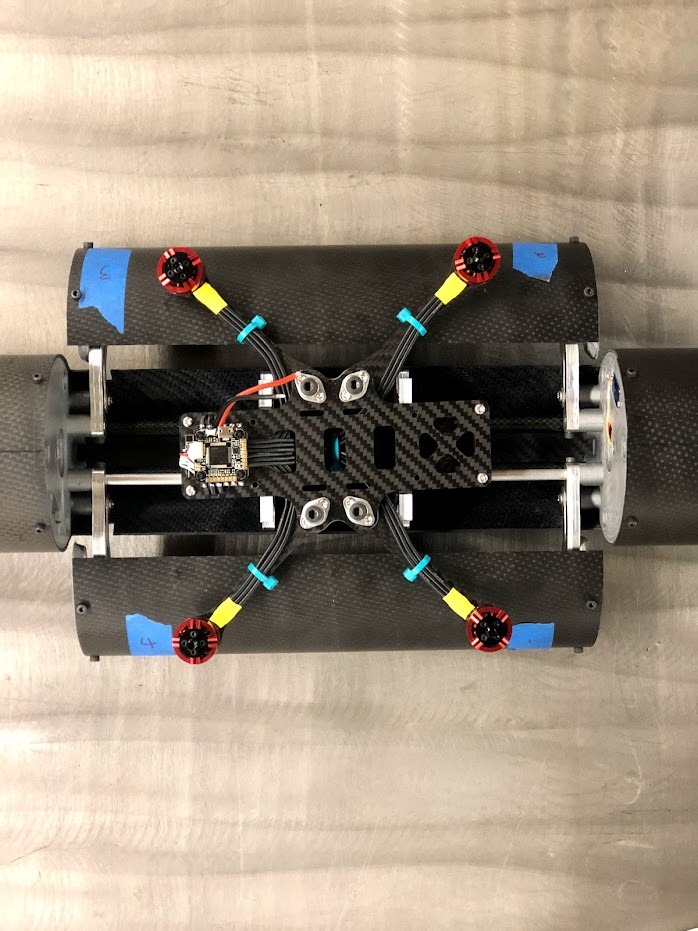
This project took place during the 2020-2021 NASA USLI competition year, and successfully jettisoned a autonomous unmanned aerial system (UAS) during the descent phase of the vehicle's mission. Upon jettison, the UAS would land, receive an arming signal, and begin its mission. The UAS would then fly to a GPS waypoint, land itself, self-level within 0.5° in all axes, and take a 360° panoramic photo which would then be sent to a ground station. This year's payload was awarded NASA's "Project Review" award, as well as "Best Looking" rocket award.

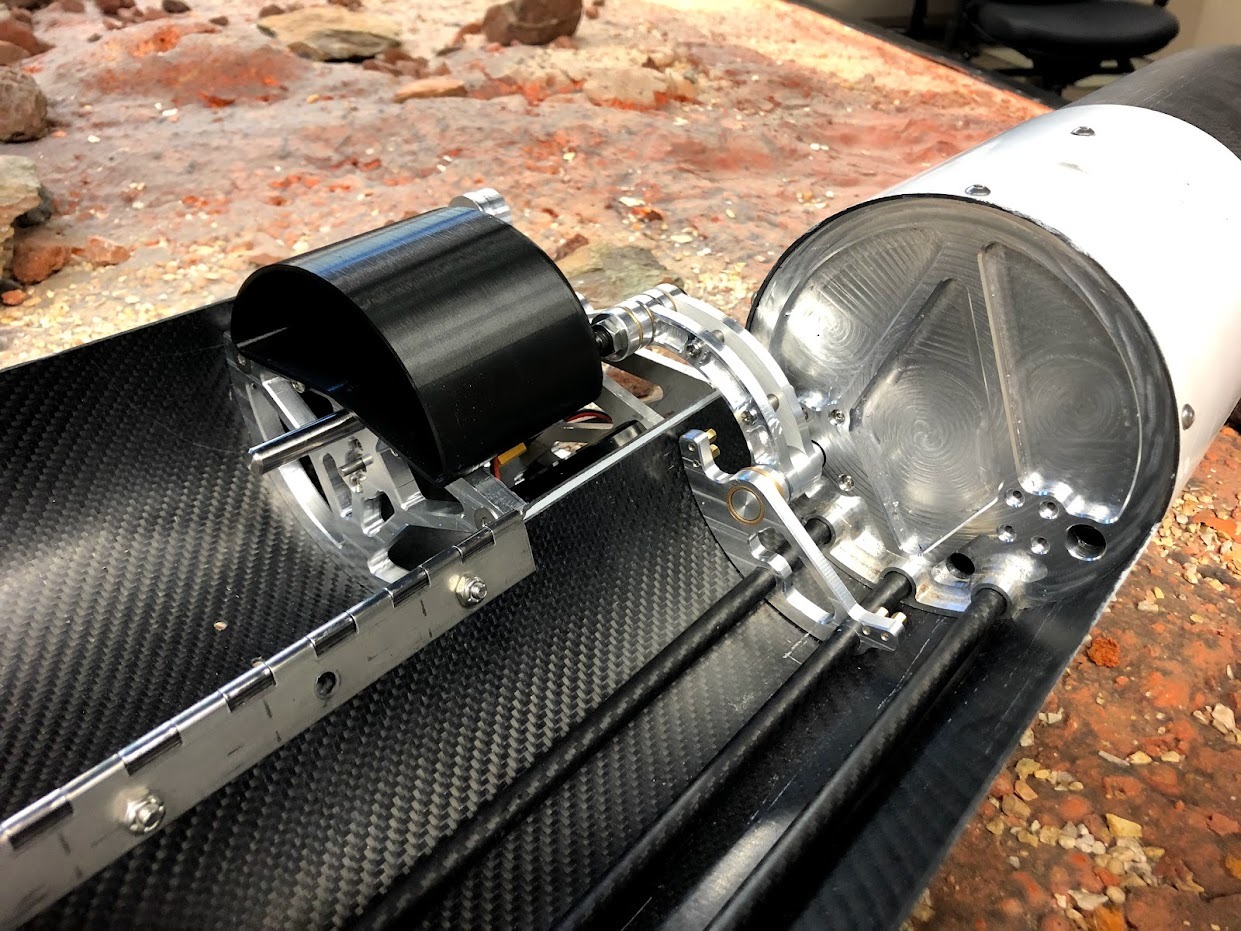
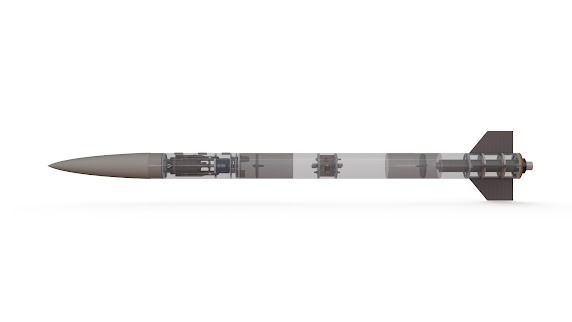
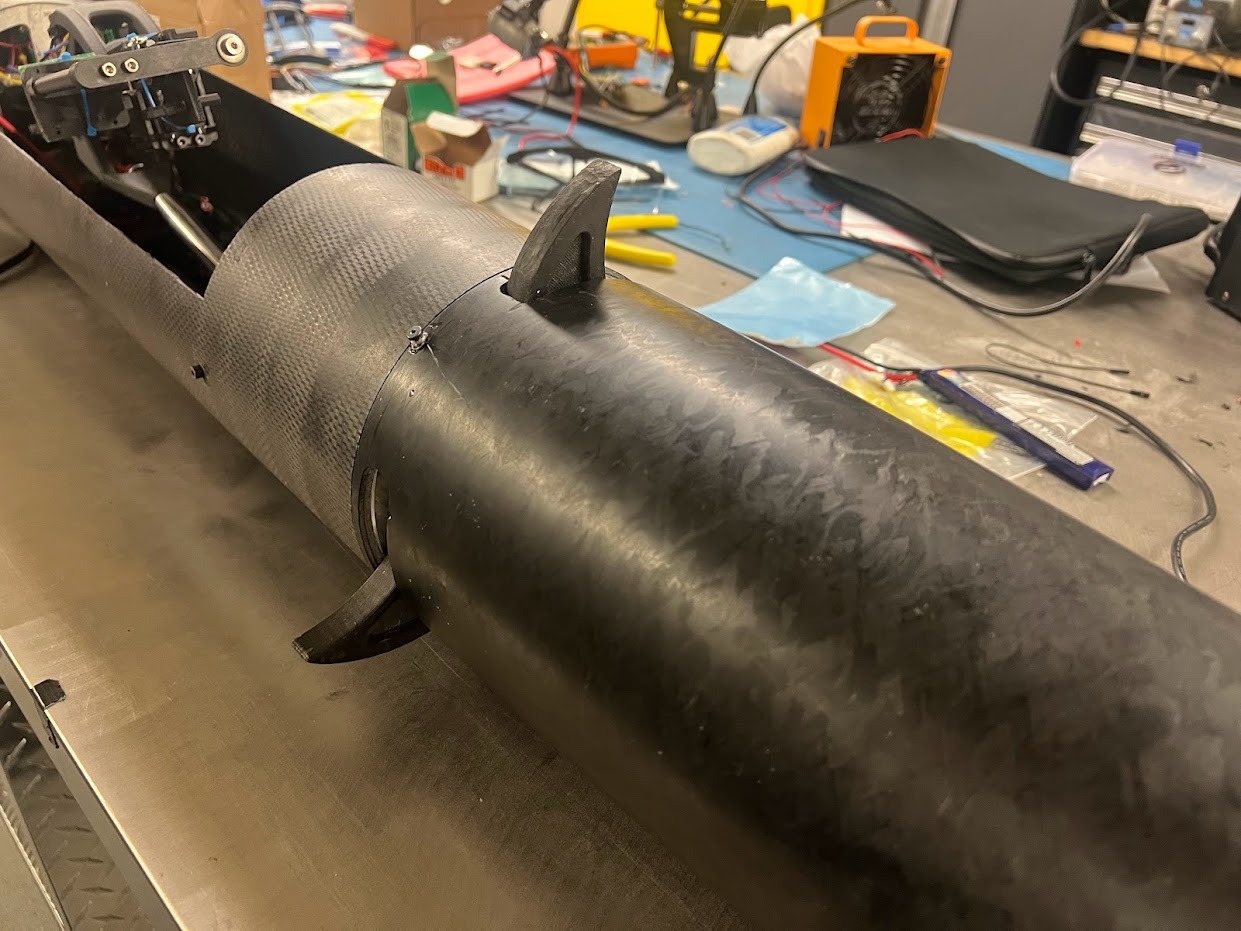
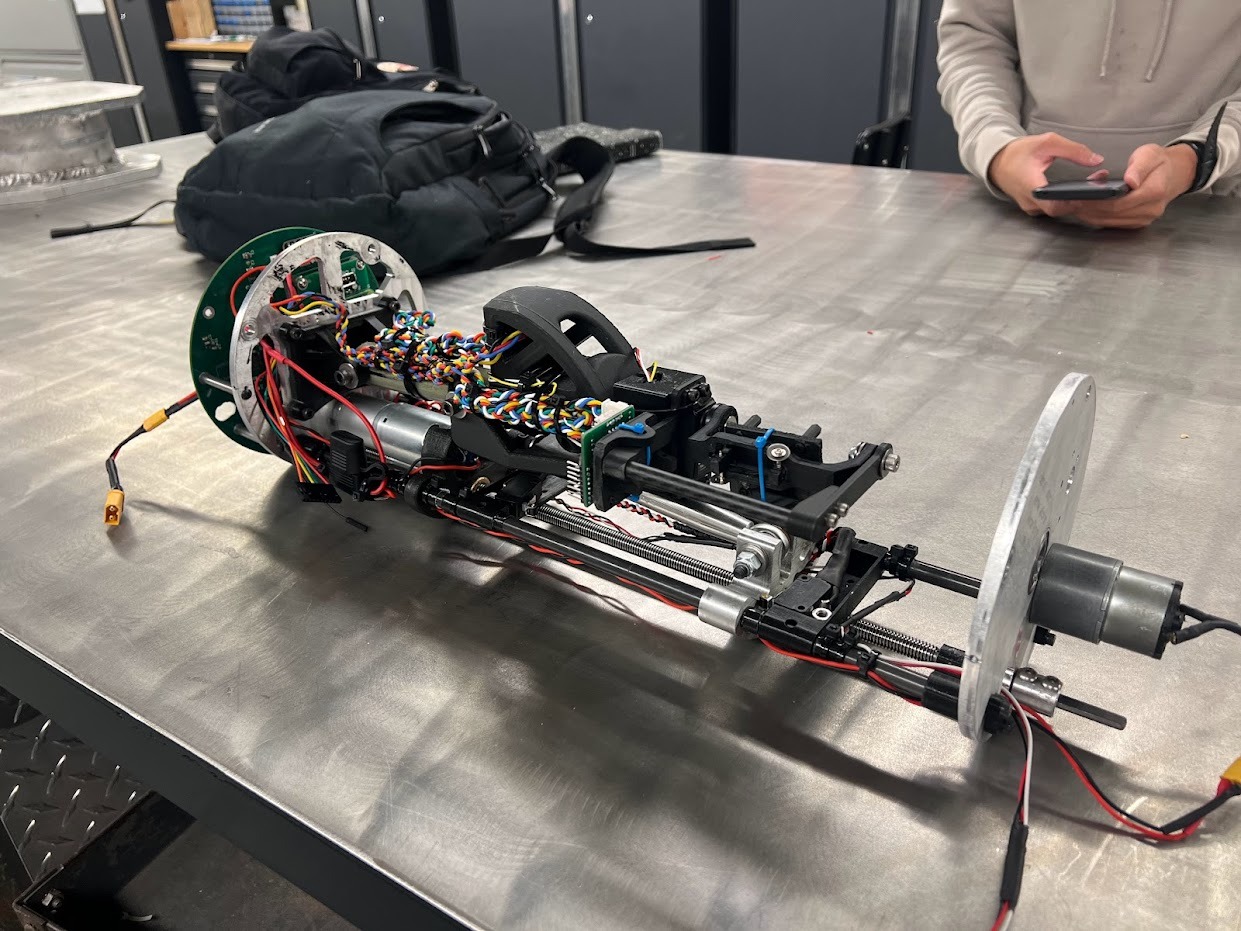
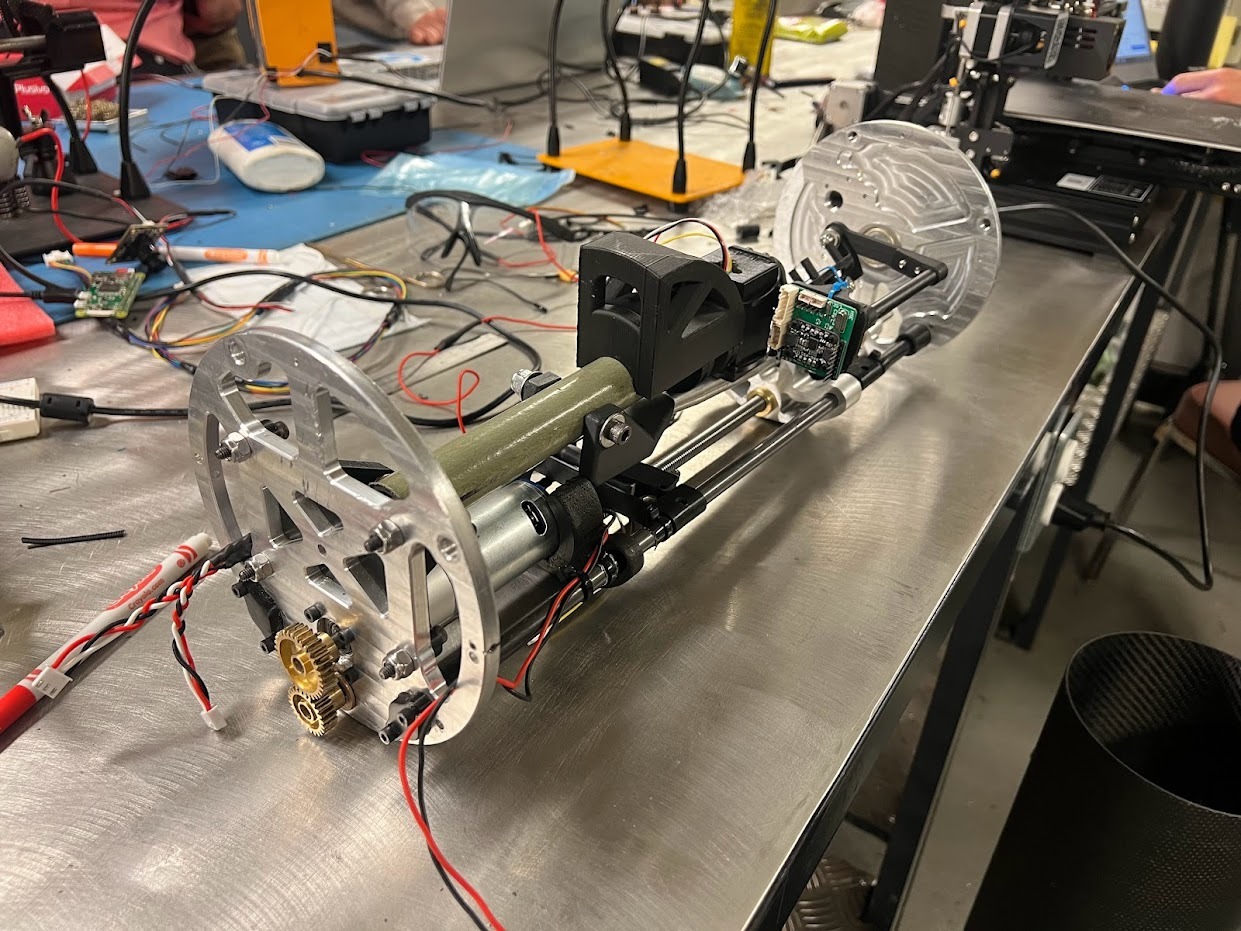
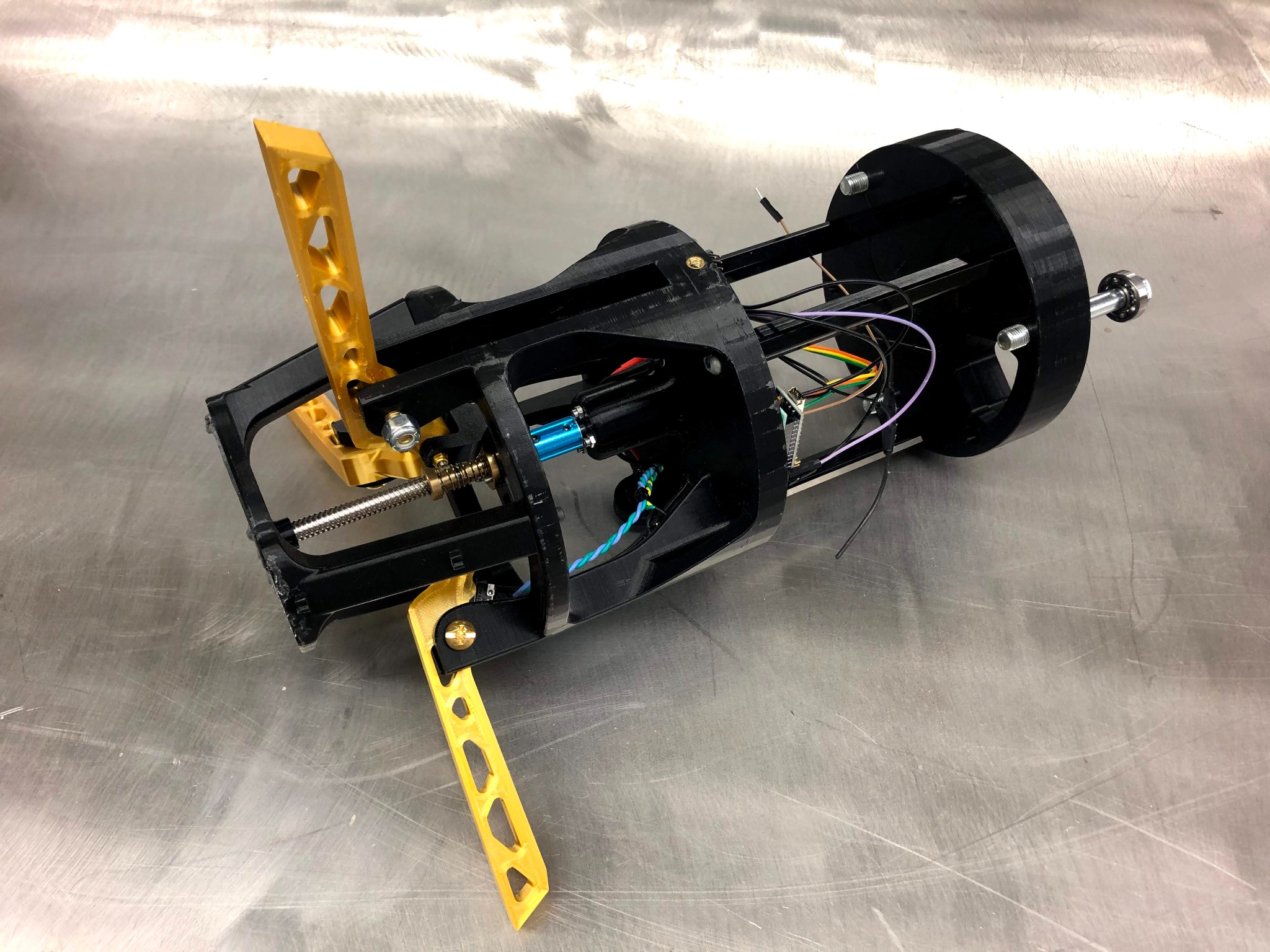
This system was developed for the 2022-2023 NASA USLI competition, focusing on creating a payload capable of executing tasks via RF commands with an on-board camera system. Divided into two components, the Dirt Brake Mechanism ensures stability upon landing, while the Arm and Camera Mechanism deploys a camera for imaging the landing site, meeting mission success criteria, and passing rigorous dynamic and vibrational analysis
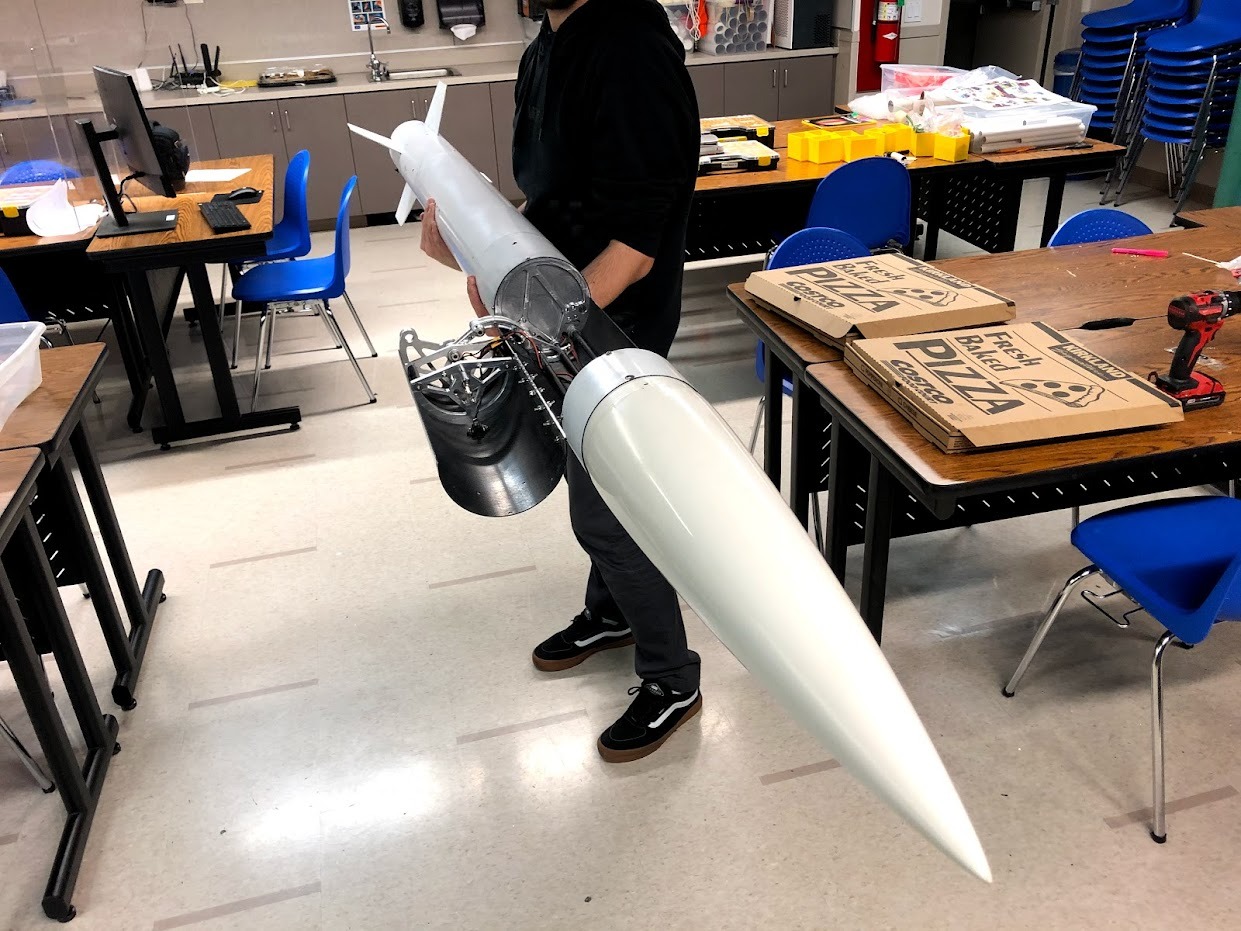
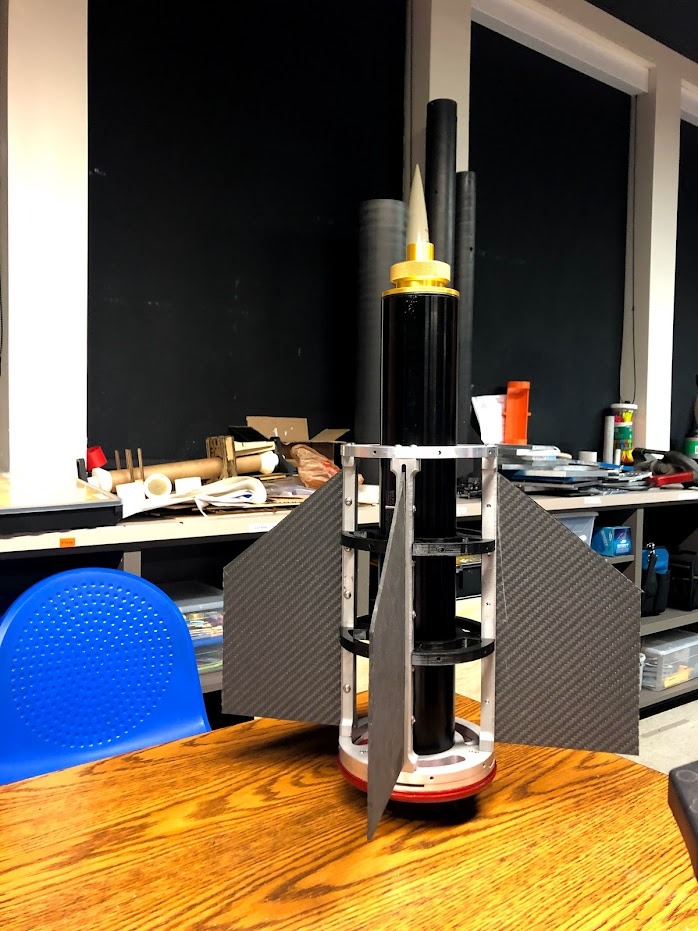
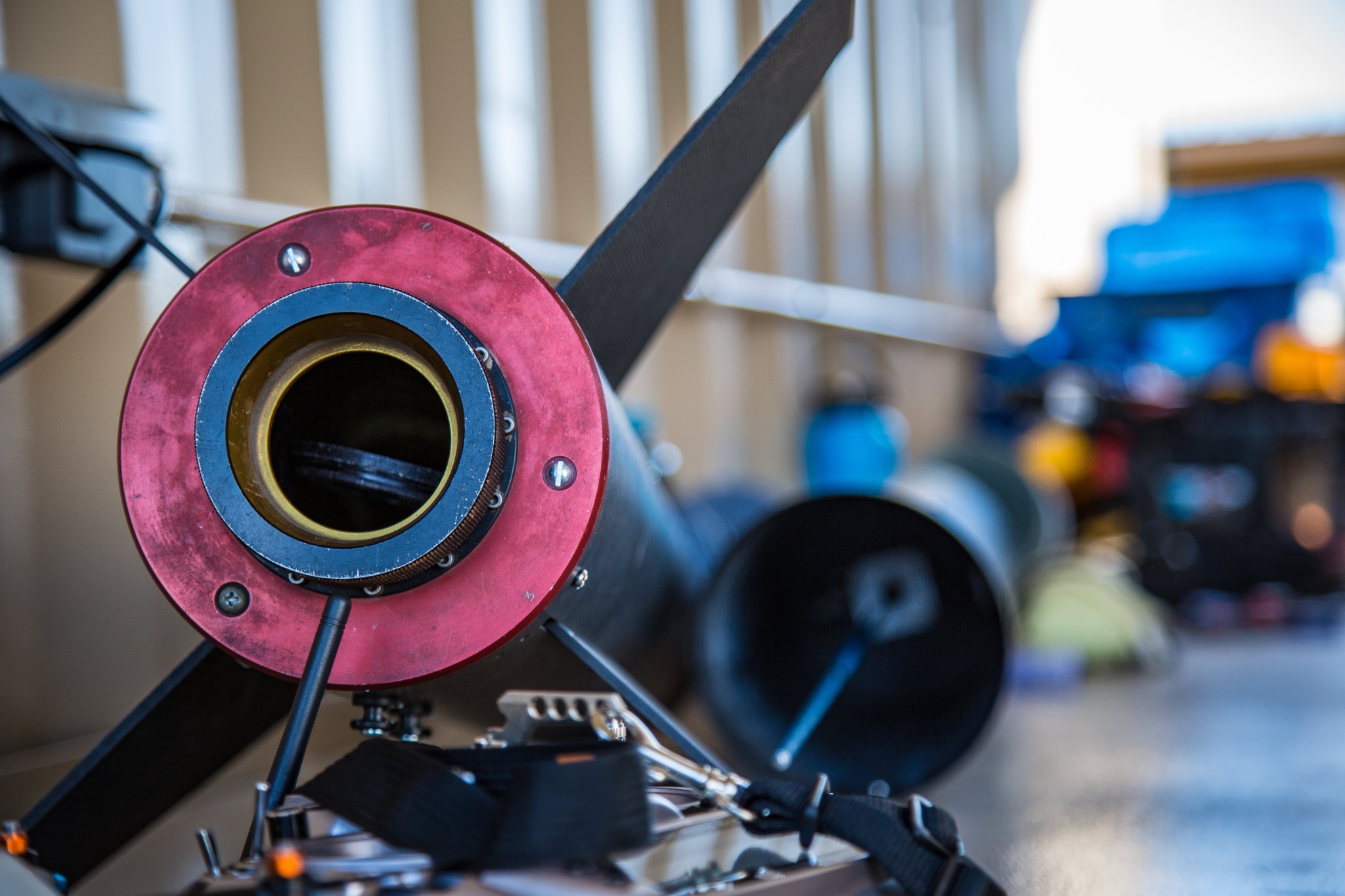
Built for the 2019-2020 NASA USLI payload challenge, this system is designed to fly aboard a NAR class 2 launch vehicle. Following a successful landing, it anchors and reorients itself to deploy a human-piloted drone. This UAV is engineered to collect payload samples from off-landing site locations. Pictures included show the project in various phases, including both sub and full scale systems.
A human-piloted UAV and RF activated deployment mechanism activate upon confirmed safe landing of the launch vehicle, and work together to deploy and fly the UAV to an off-landing site target and deploy a signal beacon of specified size and weight. This rocket and payload went on to win 5th place nationwide, with a 3rd place award for payload design.